Mechanical Engineering Senior Capstone Project at San Diego State University
Overview
For my senior capstone project, I am working on this year’s Lunabotics Team.
Lunabotics is NASA’s Lunabotics Robotic Mining Competition where student teams design and build a lunar rover that excavates lunar regolith simulant and uses it to construct protective berms intended to help shield landing pads from rocket plume ejecta and solar radiation—supporting Artemis-era lunar infrastructure concepts.
For the 2026 season described here, teams compete first at UCF’s Exolith Lab in mid-May, with the top ten advancing to the Artemis Arena at Kennedy Space Center in late May. The rover must be operated telerobotically or with autonomous controls in the arena.
In a run, the rover starts in a starting zone, navigates obstacles like rocks, craters, and a central column to reach the Excavation Zone. The rover will then collect simulant with its excavation system, transports it to the Construction Zone, and deposits it in layers to shape the berm.
The team consists of exclusively seniors in their capstone project, of which there are 16 of us on the overall team. There are 2 sub-teams:
Payload Navigation and Control (PNC), which consists of a Team of 5 mechanical engineers and 5 Electrical and Computer Engineers.
Payload, also known as Shai-Hulud (the worm from Dune), which consists of 5 mechanical engineers, one of those being myself.

Shai Hulud (Payload Team)
The payload team is in charge of the payload systems of the rover, the two main system that payload in in charge of is the excavation system that will collect the regolith and move it into storage, and the deposition system that stores the system and deposits the regolith once the rover is positioned in the construction area.
The Excavation System
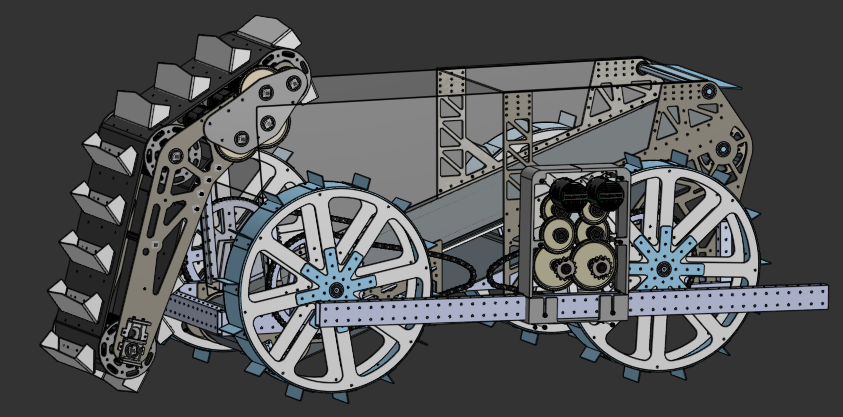
This year’s excavation system is a belt-driven bucket ladder. The ladder design was the most efficient given the time constraint of our runs during the competition as the bucket ladder system can dig and immediately move the collected regolith into deposition.
The biggest change this year is the introduction of a bend in the return path of the conveyor system, allowing the regolith discharge area to be positioned directly above the deposition system, which greatly increases the amount of regolith that makes it into the deposition system. Last year only about 30% of all regolith collected made it into the deposition system. This year it is virtually 100%, except for particles that blow away when the regolith is falling.
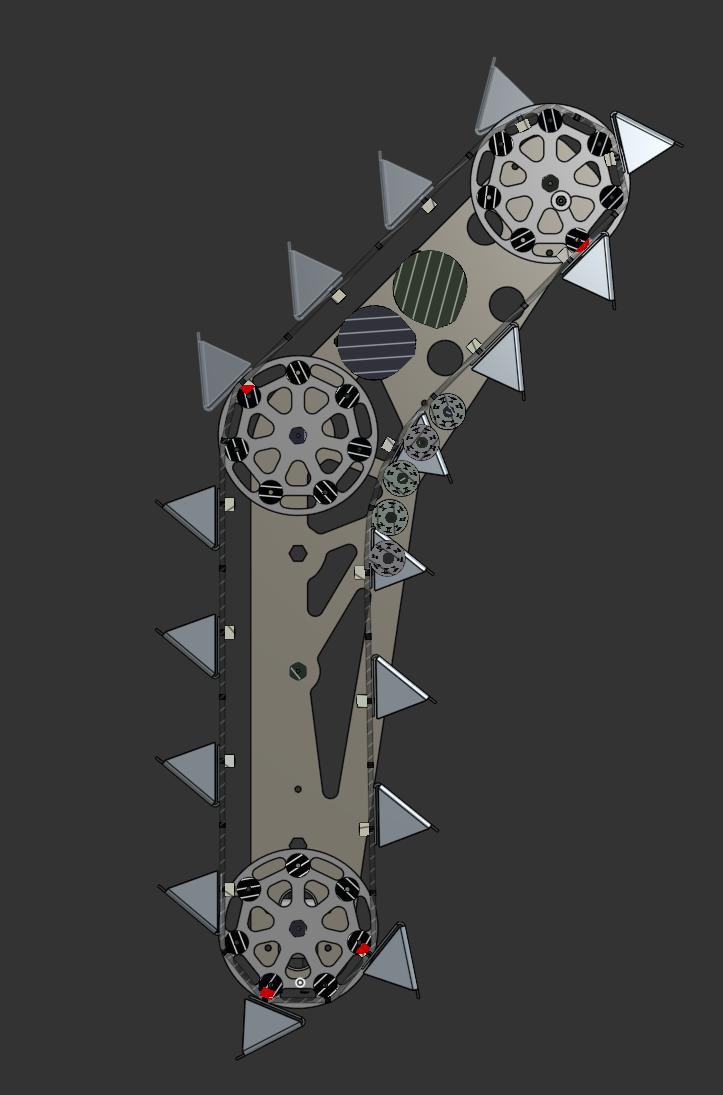
The bend is achieved by supporting the belt with two sets of 5 inner belt bearings in a circular pattern around the inner bend of the system. We opted for 5 inner bearings instead of one small pulley as the pulley would have to be support from only one side, putting a lot of moment on it.
With the 5 bearing system, the load caused from the tensioning of the belt is equally distributed among 10 bearings on cantilevers.
The greatest concern with the bent return system is the belt collapsing in the middle when at the inner bend. 5 bearings were chosen to make the bend more gradual, and to distribute the tensioned force of the belt among a greater area, reducing the risk of localized belt collapse while adding redundancy.
The belt is driven by two Kraken X60 motors. Last year’s rover used one X60 motor, and experienced run-compromising overheating issues. The motors are able to be water-cooled, but that would add complexity to our rover. Instead, we opted to using two Kraken X60 motors that will be housed in between the belt in the upper portion of the system.
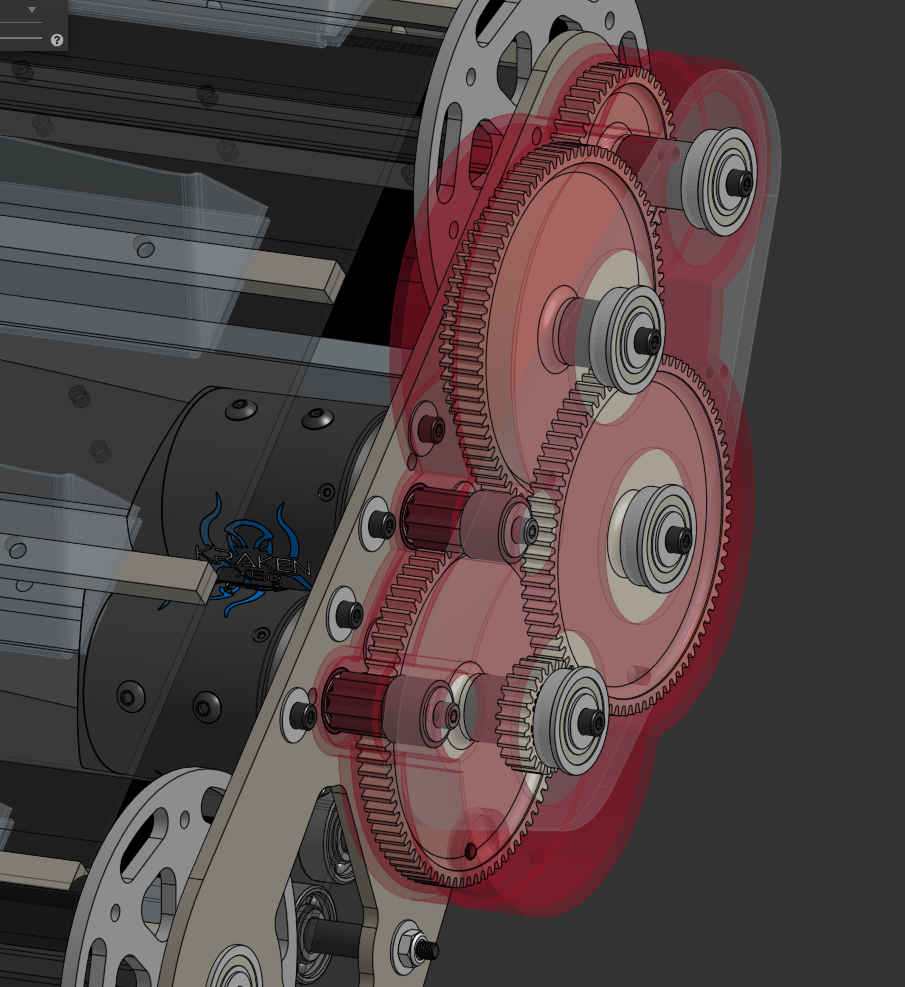
The gearbox is shielded from regolith dust using a 3D printed cover, as shown in red, and provides a 1:86 torque increase/speed decrease. The configuration of the motors and gears are designed for the motors to run at ~5500 RPM, which is their most efficient speed, delivering a combined torque of 1.18 Newton-Meters of torque. After the gearbox, we have101 Nm of torque, which translates to 1574 Newtons of force (~353 lbf), and a belt speed of 14 rotations per minute.
This gearbox is close to delivering more torque than what the hex shaft can transfer, which is the weakest link within the gearbox from the motor to the conveyor belt. The hex shaft can transfer a maximum of 116 Nm of torque before it starts yielding, which gives us a factor of safety of 1.15 in the case the belt completely jams up and the motors keep running, although unlikely.
To keep the belt running reliably, we built an in-house conveyor tensioning system so the belt can be installed and then set to the required tension. This solution also helps solve tooth-indexing issues by giving about plus or minus 1.5 teeth of tolerance so the belt teeth stay aligned with the Delrin rod spacing as the belt loops around pulleys.
For depth control, the bucket ladder is lowered into the simulant using linear actuators mounted at four attachment points between the side arms and chassis; the actuators provide feedback so the rover can estimate current depth and adjust toward a desired depth. Structurally, the side arms are specified as 3/16 in 6061 aluminum sheet.
The Deposition System

The Full Rover